
Now that we know the basics of Arduino from the first 15 lessons, we can begin to focus on more and more cool projects.
I think you will be surprised to see how many sophisticated things you can do with the simple arduino skills you have already learned. In this project, we are going to measure the speed of sound using the arduino and an ultrasonic sensor. We will use the Virtuabotix ultrasonic sensor which you can get HERE for about nine bucks. This sensor measures the time it takes an ultrasonic ping to go out, bounce off a target, and come back. The time it takes for the ping to leave and come back to the sensor depends on the speed of sound and the distance to the target. This sensor works in the same way a bat uses high pitched tones to navigate in the dark. It is also the same principle used in submarine sonar. The Arduino circuit for this project is very simple, and shown in the following schematic:
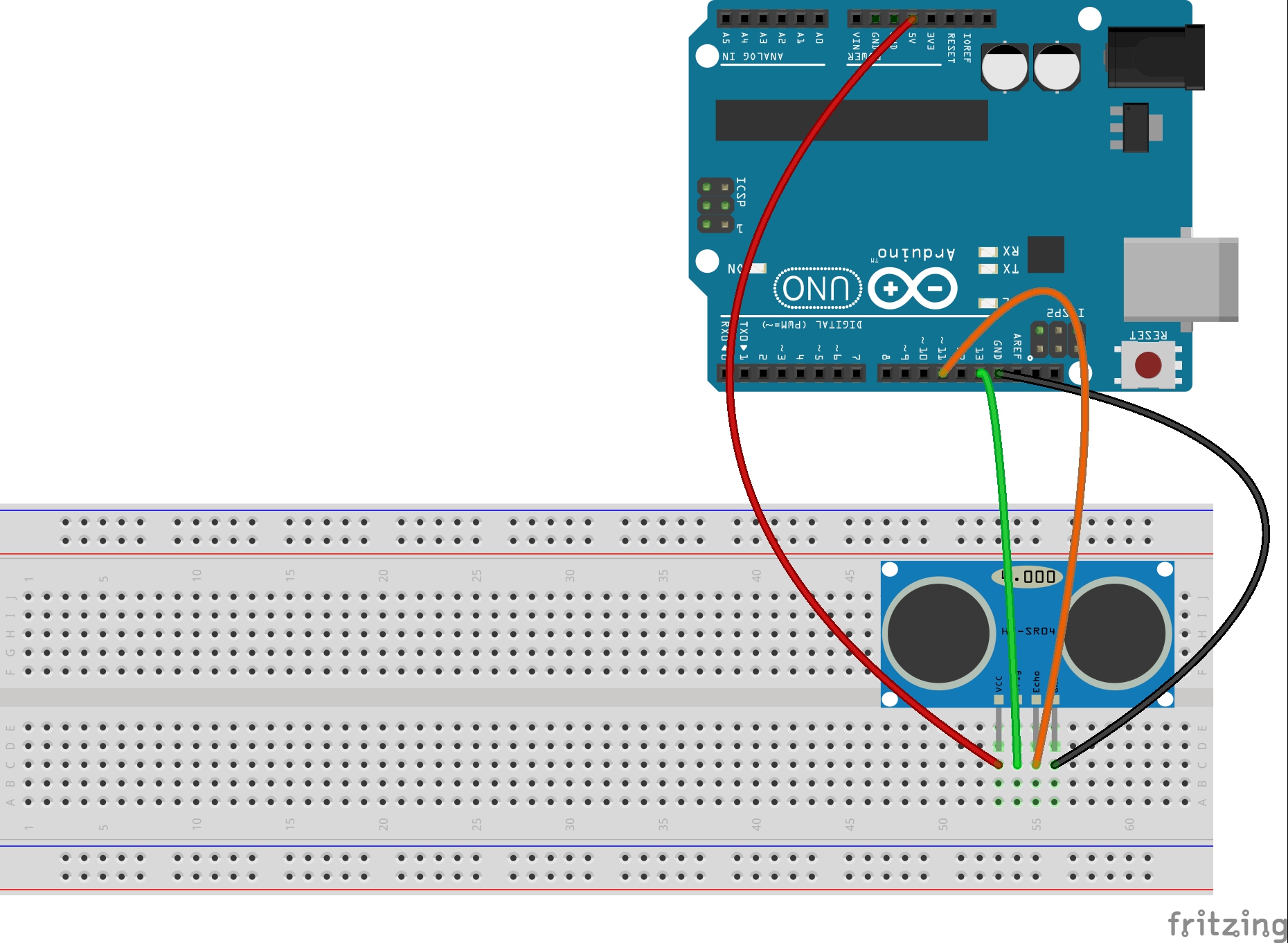
This sensor is fairly easy to use. To hook it up, we take the sensor VCC pin and hook it to the arduino 5V pin. We take the sensor GND and connect to Arduino GND. The Trig pin on the sensor we take to pin 13 on the arduino and the Echo pin on the sensor we connect to the arduino pin 11.
The sensor works as follows. You take the trigger pin LOW with a digital write. You then pause, take the trigger pin HIGH, pause, and then take the trigger pen LOW again. This LOW-HIGH-LOW sequence creates a high pitched ultrasonic tone, or ping, which is sent out from the sensor. This ping will go out and bounce off the first thing in front of it, and bounce back to the sensor. The sensor will output a HIGH pulse on its echo pin, and the length of the pulse in microseconds indicates the time it took the ping to travel to the target and return. We can measure the length of this pulse using the pulseIn command we learned in lesson 15.
Once you make the pulseIn measurement, and know the time it took for the ping to travel to the target and return, you can use that to calculate the speed of sound. Since
distance = rate * time.
Distance is the distance traveled by the ping, time is how long it took the ping to travel to the target and return. With this we can rearrange the equation to solve for rate, which would be the speed of sound:
rate = time/distance
Since pulse in returns the ping travel time in microseconds, and if you measure the distance to the target in inches, the units on the rate will be in inches per microsecond. We would need to use dimensional analysis to convert this to miles per hour as follows:
(rate in inches/mircrosecond)*(1000000 microsecond/second)*
(3600 seconds/hour)*(1 mile/63360 inches)
This will then give rate in miles per hour, as you can see as the units cancel out. The video explains this in more detail.
Key thing to remember in doing this calculation is that the ping has to travel to the target and then return. If the target is 6 inches from the sensor, how far did the ping travel? It traveled 12 inches. Six to get to the target and six to return from the target.
Try and put it all together into a program that will measure the speed of sound. I have included the code below. Try and write the program yourself, but if you get stuck you can look at the code below. It is important not to copy and paste this code, but only use it as a guide. You need to type your programs in yourself.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 |
int trigPin=13; //Sensor Trip pin connected to Arduino pin 13 int echoPin=11; //Sensor Echo pin connected to Arduino pin 11 float pingTime; float speedOfSound; int targetDistance=6; //Distance to Target in inches void setup() { // put your setup code here, to run once: Serial.begin(9600); pinMode(trigPin, OUTPUT); pinMode(echoPin, INPUT); } void loop() { // put your main code here, to run repeatedly: digitalWrite(trigPin, LOW); //Set trigger pin low delayMicroseconds(2000); //Let signal settle digitalWrite(trigPin, HIGH); //Set trigPin high delayMicroseconds(10); //Delay in high state digitalWrite(trigPin, LOW); //ping has now been sent pingTime = pulseIn(echoPin, HIGH); //pingTime is presented in microceconds speedOfSound = (targetDistance*2)/pingTime*(1000000)*3600/63360; //converts to miles per hour Serial.print("The Speed of Sound is: "); Serial.print(speedOfSound); Serial.println(" miles per hour"); delay(1000); } |
Check this out and see how close it is to published values for the speed of sound. Pretty Cool!